
介紹
計算機視覺工程對初級工程師來說可能具有挑戰性,因為它需要深入瞭解基礎概念和新興技術。在這篇文章中,我們整理了一份**頂級面試問題和答案**列表,這些問題和答案討論了計算機視覺的關鍵領域,並提供了對有抱負的**計算機視覺工程師**可以期待什麼以及如何為面試做好準備的見解。
1. 高階 CNN 架構:你能比較和對比 AlexNet、VGG 和 ResNet 等不同的 CNN 架構嗎?它們對影像分類的方法有何不同?
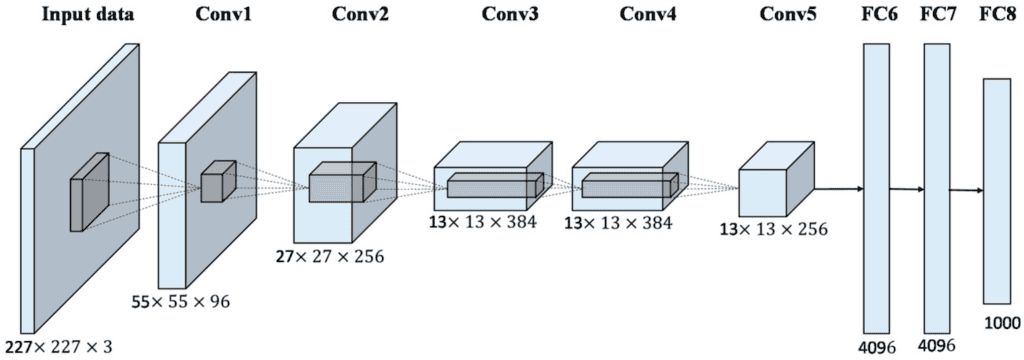
AlexNet
它於 2012 年推出,是第一個顯著提高影像分類效能的深度神經網路之一。
AlexNet 包含 8 層,其中 5 層卷積層,後面跟著 3 層全連線層。
它使用**ReLU**(線性整流函式)進行非線性運算,與 tanh 或 sigmoid 函式相比,它有助於更快地進行訓練。
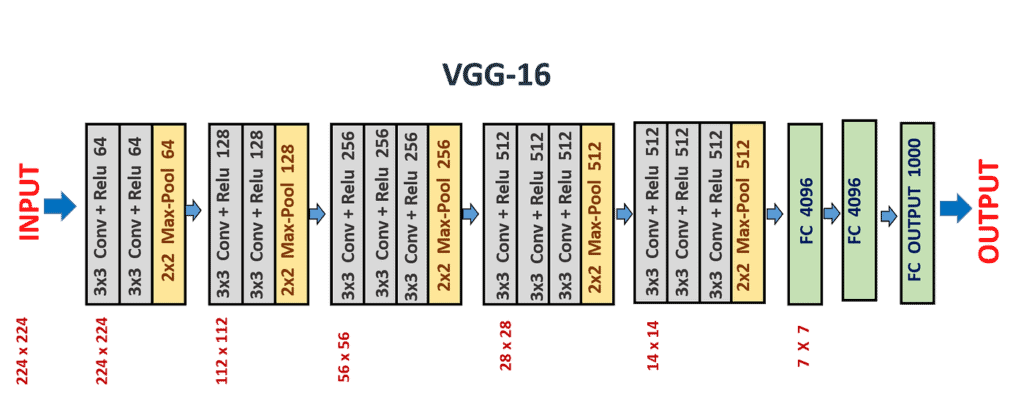
VGG(視覺幾何組)
VGG 由牛津大學的視覺幾何組開發,於 2014 年推出。
它以其簡單性而聞名,只使用 3×3 卷積層,這些卷積層以不斷增長的深度堆疊在一起。
VGG 有 VGG16 和 VGG19 等變體,其中的數字表示層數。儘管其結構更深,但 VGG 的統一架構相對簡單。
ResNet(殘差網路)
ResNet 由微軟於 2015 年推出,透過引入跳躍連線或殘差連線,它帶來了重大創新。
ResNet 允許透過使用這些連線來向前傳遞來自先前層的啟用,從而訓練更深層的網路(最多 152 層)。
方法的主要區別在於 ResNet 使用這些跳躍連線將來自先前層的輸出新增到後面的層,這有助於克服梯度消失問題。
影像分類方法的差異
AlexNet 在當時具有革命性意義,它將深度學習引入計算機視覺領域,但與更新的模型相比,它的架構相對較淺。
**VGG** 專注於深度,表明使用小的卷積濾波器增加深度可以顯著提高效能。但是,它的計算量很大,並且引數很多,導致記憶體使用率很高。
ResNet 透過引入殘差學習採用了一種不同的方法。這使得可以訓練非常深的網路,而無需擔心梯度消失,而梯度消失通常發生在傳統的深度網路中。這使得 ResNet 能夠以更高的深度實現更高的精度,而無需複雜度成比例地增加。
2. 深度學習最佳化:您如何最佳化計算機視覺中深度學習模型的訓練過程,以及不同最佳化演算法的權衡是什麼?
最佳化計算機視覺中深度學習模型的訓練過程涉及多種策略
**資料預處理:**確保你的資料乾淨且經過充分準備。這包括將影像規範化為具有相似比例,以及透過新增旋轉或翻轉等變化來增強資料集,以提高模型的泛化能力。
**學習率調整:**學習率控制著模型權重在每次更新模型權重時,根據估計誤差變化的程度。使用學習率衰減等技術,其中學習率隨著時間的推移而降低,可以幫助模型更有效地收斂到一個解決方案。
**正則化:**為了防止過擬合(模型對訓練資料學習得過好,而在看不見的資料上表現不佳),**L1 和 L2** 正則化等方法會對模型中較大的權重進行懲罰。
**批次大小:**饋送到模型的資料批次的尺寸會影響訓練速度和穩定性。較大的批次提供了更準確的梯度估計,但它們需要更多記憶體,並且可能會減慢訓練過程。
**最佳化器選擇:**不同的最佳化器會影響訓練速度和效能。例如,隨機梯度下降**(SGD)**對於許多問題來說既簡單又有效,而更復雜的最佳化器(如 Adam)會動態地調整學習率,並且在某些情況下可以更快地收斂。
不同最佳化演算法的權衡
**SGD** 非常穩健,並且已經存在很長時間了,但它可能需要更長的時間來收斂,尤其是在複雜的模型和大型資料集上。
Adam 由於其自適應學習率特性,可以更快地收斂,但如果調節不當,可能會導致過擬合,並且有時在訓練結束時效能不佳。
**Adagrad** 會根據引數調整學習率,對更新頻率較低的引數進行更大的更新,但它可能會過早地降低學習率。
選擇合適的最佳化方法並調整這些引數需要在收斂速度、計算成本和模型在看不見的資料上的最終效能之間取得平衡。
3. 自動駕駛中的計算機視覺:計算機視覺如何在自動駕駛中應用,該領域的主要挑戰是什麼?
**目標檢測和分類:**計算機視覺模型識別和分類物體,例如其他車輛、行人、交通燈和道路標誌。這有助於車輛瞭解其周圍環境,並根據其“看到”的內容做出決策。
**車道線檢測:**計算機視覺有助於檢測道路上的車道線標記。這對保持車輛在車道內行駛以及安全變道至關重要。
**交通標誌識別:**自動駕駛汽車使用計算機視覺來識別交通標誌並做出相應的反應,例如在停車標誌前停車或根據限速調整速度。
**深度感知:**透過使用**立體視覺**等技術,車輛可以估計到各種物體的距離,這對避碰和路徑規劃至關重要。
該領域的主要挑戰
**環境條件的變化:**計算機視覺系統必須在各種光照條件(白天、夜晚、黃昏、黎明)和天氣條件(雨、霧、雪)下可靠地工作,這些條件會顯著影響能見度。
**動態且不可預測的因素:**道路是動態環境,其中包含不可預測的因素,例如行人突然橫穿道路或其他車輛突然剎車。
**感測器融合:**結合來自各種感測器(攝像頭、**雷射雷達、雷達)的資料以建立對環境的連貫理解是一項挑戰,但對於準確的感知和決策至關重要。
**即時處理:**計算機視覺演算法必須即時處理和分析資料,以做出即時決策,這需要高效且快速的處理能力。
**資料和模型魯棒性:**確保計算機視覺演算法的訓練資料多樣且全面,足以處理罕見或異常情況,並且模型對變化和異常具有魯棒性,是一項重大挑戰。
4. 3D 重建:討論計算機視覺中從 2D 影像進行 3D 重建的過程和挑戰。
計算機視覺中從 2D 影像進行 3D 重建涉及從物體的二維照片建立物體的三維模型或場景的三維模型。以下是該過程的通常工作原理以及涉及的挑戰。

3D 重建過程
**影像捕獲:**從不同角度拍攝物體的多張照片。
**特徵匹配:**計算機視覺演算法識別和匹配不同影像之間的特徵。特徵是可以在其他影像中可靠地識別的影像中的點,例如角落、邊緣或特定的紋理模式。
**估計運動:**使用匹配的特徵來估計拍攝每張影像時攝像頭位置之間的相對運動。
**重建幾何:**使用攝像頭運動和特徵對應關係,重建場景或物體的幾何形狀。這可以使用多種方法來完成,例如三角測量,其中點的 3D 位置透過交叉來自兩個攝像頭位置的視線來確定。
**紋理對映:**最後一步涉及將影像對映到重建的 3D 模型上,以使其具有逼真的外觀。
3D 重建的挑戰
**特徵歧義:**場景不同部分中的相似特徵可能會導致匹配錯誤,影響重建的準確性。
**遮擋:**場景或物體的一部分可能在某些影像中被遮擋,導致資料不完整,並可能導致 3D 模型中的錯誤。
**比例和解析度:**影像的比例和解析度會影響 3D 重建的細節程度和質量。
**運動估計:**準確地估計攝像頭或物體的運動,尤其是當運動很複雜或影像從顯著不同的視角拍攝時,可能很困難。
**計算強度:**3D 重建,尤其是大型或複雜場景的重建,需要大量的計算資源和時間,尤其是在需要高細節水平的情況下。
5. 神經網路剪枝和壓縮:你能解釋神經網路剪枝和壓縮的概念,以及它在邊緣裝置上部署計算機視覺模型中的重要性嗎?
神經網路剪枝和壓縮是用於減小神經網路模型的尺寸和複雜度而不顯著降低其效能的技術。
神經網路剪枝
剪枝涉及從神經網路中刪除不必要或冗餘的引數。這可能意味著消除對模型輸出影響很小或沒有影響的權重。
該過程通常從訓練一個大型的、引數過多的模型開始,然後透過根據某些標準(例如最小絕對值)刪除權重來對其進行剪枝。


然後對剪枝後的網路進行微調,以保留其效能,儘管尺寸減小了。
神經網路壓縮
壓縮透過應用量化等技術超越了剪枝,這些技術減少了模型中數值的精度。
例如,壓縮模型可能使用 8 位整數代替 32 位浮點數來表示權重,從而顯著降低模型大小和計算需求。
其他壓縮技術包括使用知識蒸餾,其中較小的模型被訓練以複製較大、更復雜模型的行為。
在邊緣裝置上部署的重要性
邊緣裝置,如智慧手機和物聯網裝置,記憶體、處理能力和能源資源有限。由於這些限制,在這些裝置上部署全尺寸神經網路模型可能不切實際或不可能。
剪枝和壓縮減少了模型的大小和計算需求,使其能夠在邊緣裝置上運行復雜的計算機視覺演算法。
這使得可以在裝置上即時處理和分析視覺資料,減少了將資料持續傳輸到雲伺服器的必要性,從而節省了頻寬並降低了延遲。
6. 即時目標檢測:您將使用哪些策略來提高即時目標檢測系統的速度和準確性?
提高即時目標檢測系統的速度和準確性涉及多種策略。
模型架構選擇:選擇專門為即時處理而設計的有效模型架構,例如 YOLO(You Only Look Once)、SSD(Single Shot MultiBox Detector)或更復雜模型的縮小版本,如 Tiny YOLO。這些模型針對速度進行了最佳化,可以在即時情況下以良好的準確性執行。
模型剪枝和量化:透過剪枝不太重要的連線和將模型引數量化為較低的精度來降低模型的複雜性。這減少了計算負載,並可以加快檢測過程,而不會顯著降低精度。
最佳化硬體利用率:使用專門的硬體加速器(如 GPU、TPU 或 FPGA),這些加速器旨在有效地處理深度學習模型所需的平行計算。這可以顯著提高目標檢測的速度。
軟體最佳化:最佳化程式碼並使用高效演算法進行預處理和後處理步驟。利用針對性能最佳化的軟體庫(如 OpenCV)也可以幫助減少延遲。
使用增強資料訓練:透過使用包含各種場景和條件的各種資料訓練模型來提高準確性。資料增強技術(如縮放、裁剪和旋轉)可以幫助模型更好地泛化並在不同環境中表現得更準確。
超引數調整:微調模型超引數,如學習率、批次大小和迭代次數,以找到特定應用程式的速度和準確性之間的最佳平衡。
邊緣計算:在資料收集的裝置上或附近(邊緣計算)處理資料,而不是將其傳送到集中式伺服器。這減少了延遲,可以加快目標檢測系統的響應時間。
7. 視覺Transformer:解釋視覺Transformer(ViT)的概念及其在影像處理方面與傳統CNN的不同之處。
視覺Transformer(ViT)代表了影像處理方式的轉變,與傳統卷積神經網路(CNN)所採用的方法有很大不同。
視覺Transformer的概念
ViT 將最初設計用於自然語言處理的 Transformer 架構應用於影像分析。
在 ViT 中,影像被分成多個塊,然後這些塊被展平成一串嵌入。Transformer 網路處理這些嵌入,類似於 NLP 中的標記。
Transformer 使用自注意力機制來權衡影像中不同塊的重要性,使模型能夠專注於與手頭任務相關的影像部分。
與傳統CNN的差異
架構:雖然卷積神經網路使用卷積層從影像中分層提取特徵,但 ViT 使用自注意力機制來考慮整個影像上下文,使它們能夠捕獲影像內的全域性依賴關係。
感受野:在 CNN 中,感受野是區域性的,並且隨著連續的卷積層的增加而增大。相反,ViT 從一開始就具有全域性感受野,因為每個 Transformer 層都可以關注影像的所有部分。
特徵提取:CNN 透過區域性濾波器和池化操作提取特徵,而 ViT 直接學習關注重要的影像部分,而不會受到卷積結構的約束。
資料效率:CNN 通常更有效率,並且可以使用較小的資料集很好地工作。另一方面,ViT 需要大量資料從頭開始訓練,但在用足夠的資料訓練後表現出色,在大型資料集上的效能往往超過 CNN。
計算資源:ViT 通常比 CNN 更計算密集,特別是對於較大的影像,因為自注意力機制的複雜度隨塊的數量(序列長度)而變化。
8. 計算機視覺中的機器學習偏差:機器學習模型中的偏差如何影響計算機視覺任務,以及可以採取哪些措施來減少這種偏差?
機器學習模型中的偏差會對計算機視覺任務產生重大影響,導致不公平或不準確的結果。以下是偏差如何影響計算機視覺以及減少偏差的步驟。
偏差對計算機視覺任務的影響
不公平:偏差會導致某些群體的待遇不公。例如,面部識別系統被發現對某些種族或性別的人的錯誤率更高。
不準確:有偏差的訓練資料會導致不準確的模型,這些模型在現實世界場景中表現不佳,特別是對於代表性不足的群體或條件。
減少偏差的步驟
多樣化和有代表性的資料:確保訓練資料集是多樣化的,並且代表了模型將被用於的現實世界場景。這包括種族、性別、年齡、照明條件、背景等的差異。
定期稽核和測試:定期稽核和測試模型的偏差和準確性,使用包含各種人口統計和場景的多樣化資料集。
偏差緩解技術:在訓練過程中使用偏差緩解技術。這可能包括對訓練資料進行重新加權、修改模型的目標以考慮公平性,或使用旨在減少偏差的演算法。
透明度和可解釋性:開發透明且可解釋的模型,允許識別和糾正偏差。可解釋的人工智慧可以幫助利益相關者瞭解決策是如何做出的以及為什麼做出這些決策。
道德和包容性設計實踐:在計算機視覺系統的開發中採用道德準則和包容性設計實踐。與多元化團隊和利益相關者合作可以提供多種視角,並幫助識別潛在的偏差。
持續監控和反饋:部署後,持續監控系統的效能並收集反饋,以識別和糾正任何出現的偏差或不準確之處。
9. 計算機視覺中的增強現實:討論計算機視覺在增強現實應用程式中的作用以及所涉及的技術挑戰。
計算機視覺在增強現實 (AR) 應用程式中發揮著至關重要的作用,使裝置能夠即時瞭解和與現實世界互動。以下是計算機視覺如何為 AR 做出貢獻以及它面臨的技術挑戰。

計算機視覺在AR中的作用
環境對映:計算機視覺演算法有助於建立周圍環境的數字地圖。這對於將虛擬物件準確地放置在現實世界中至關重要。
物體識別和跟蹤:AR 系統使用計算機視覺來識別和跟蹤現實環境中的物體或特定點,從而使虛擬和現實世界元素無縫整合。
深度感知:計算機視覺技術用於估計環境中物體的距離,這對於將虛擬物體正確地疊加到現實世界中至關重要。
AR中的技術挑戰
即時處理:AR 需要快速有效地處理視覺資料,以確保無縫且身臨其境的體驗。實現這種即時效能具有挑戰性,尤其是在計算資源有限的裝置上。
準確性和精度:為了獲得令人信服的 AR 體驗,物體放置、跟蹤和互動的準確性和精度必須很高。在各種環境條件下確保這種精度具有挑戰性。
照明和環境條件:照明變化和不同的環境條件會影響計算機視覺演算法在 AR 系統中的效能。系統必須足夠健壯,能夠處理這些變化,而不會降低使用者體驗。
使用者互動和體驗:設計由計算機視覺支援的直觀且自然的 AR 使用者互動,需要能夠理解和預測使用者意圖和動作的複雜演算法。
功耗:計算機視覺演算法,特別是那些在行動式 AR 裝置(如智慧手機和 AR 眼鏡)上執行的演算法,必須針對低功耗進行最佳化,以確保更長的電池壽命。
結論
我們探討的問題和答案讓我們得以一窺計算機視覺的複雜世界,突出了持續學習和適應的重要性。
無論您是為面試做準備還是隻是想了解更多,這些見解將有助於您成功。


